

UP Board Class 12 Mathematics Question Paper with Answer Key Code 324 AX is available for download. The exam was conducted by the Uttar Pradesh Madhyamik Shiksha Parishad (UPMSP) on February 27, 2023 in Afternoon Session 2 PM to 5:15 PM. The medium of paper was English and Hindi. In terms of difficulty level, UP Board Class 12 Mathematics paper was Easy. The question paper comprised a total of 9 questions.
UP Board Class 12 Mathematics (Code 324 AX) Question Paper with Solutions PDF
| UP Board Class 12 Mathematics Question Paper with Answer Key | Check Solutions |

The degree of differential equation \[ \frac{d^2y}{dx^2} = \left( y + \frac{dy}{dx} \right)^{\frac{1}{5}} \]
will be
The value of \[ \int \cos^2 x \, dx \]
will be
The angle between the vectors \[ \mathbf{A} = 2\hat{i} + \hat{j} + 3\hat{k} \quad and \quad \mathbf{B} = 3\hat{i} - 2\hat{j} + \hat{k} \]
will be
If the numbers of elements of two finite sets \( A \) and \( B \) are \( m \) and \( n \) respectively, then the total number of relations from \( A \) to \( B \) will be
If \( A = \{1, 2, 3\} \), \( B = \{2, 3, 4\} \), then the function from A to B will be
Prove that the function \[ f(x) = \begin{cases} x^3 - 3 & if x \leq 2
x^2 + 1 & if x > 2 \end{cases} \]
is continuous at \( x = 2 \).
Find the differential equation of the family of curves \[ y = a \sin(x + b), \]
where \( a \) and \( b \) are arbitrary constants.
Prove that the function \( f: \mathbb{N} \to \mathbb{N} \) defined by \( f(x) = x - 1 \), when \( x > 2 \), and \( f(1) = f(2) = 1 \), is onto but not one-to-one.
If \( P(A) = P(B) = \frac{5}{13} \) and \( P(A \cap B) = \frac{2}{5} \), then find \( P(A \cup B) \).
Solve the inequality \( 8x + 4 < 7x + 8 \).
Find the coordinates of the point which divides the line joining the points \( (2, -5, 1) \) and \( (1, 4, -6) \) internally in the ratio 2 : 3.
Find the area of the triangle whose two sides are represented by the vectors \[ \vec{a} = 3\hat{i} - \hat{j} + 5\hat{k}, \quad \vec{b} = \hat{i} + 2\hat{j} - \hat{k}. \]
If \[ A = \begin{bmatrix} \cos \theta & \sin \theta
-\sin \theta & \cos \theta \end{bmatrix}, \]
prove that \[ A^3 = \begin{bmatrix} \cos 3\theta & \sin 3\theta
-\sin 3\theta & \cos 3\theta \end{bmatrix}. \]
Two integers among 1 to 11 are selected at random. If their sum is even, then find the probability that both integers are odd.
If \( f : \mathbb{R} \to \mathbb{R} \), where \( f(x) = \sin x \) and \( g : \mathbb{R} \to \mathbb{R} \), where \( g(x) = x^2 \), then find the range of \( f(x) \) and \( g(x) \).
If \( P(A) = \frac{1}{2} \), \( P(B) = \frac{1}{3} \), and \( P(A \cup B) = \frac{2}{3} \), prove that the events \( A \) and \( B \) are independent.
If \( \vec{a} = 2\hat{i} + 2\hat{j} + 3\hat{k} \), \( \vec{b} = -\hat{i} + 2\hat{j} + \hat{k} \), and \( \vec{c} = 3\hat{i} + \hat{j} \) are such that \( \vec{a} + \lambda \vec{b} \) is perpendicular to \( \vec{c} \), then find the value of \( \lambda \).
Solve the differential equation \( (x - y) \, dy - (x + y) \, dx = 0 \).
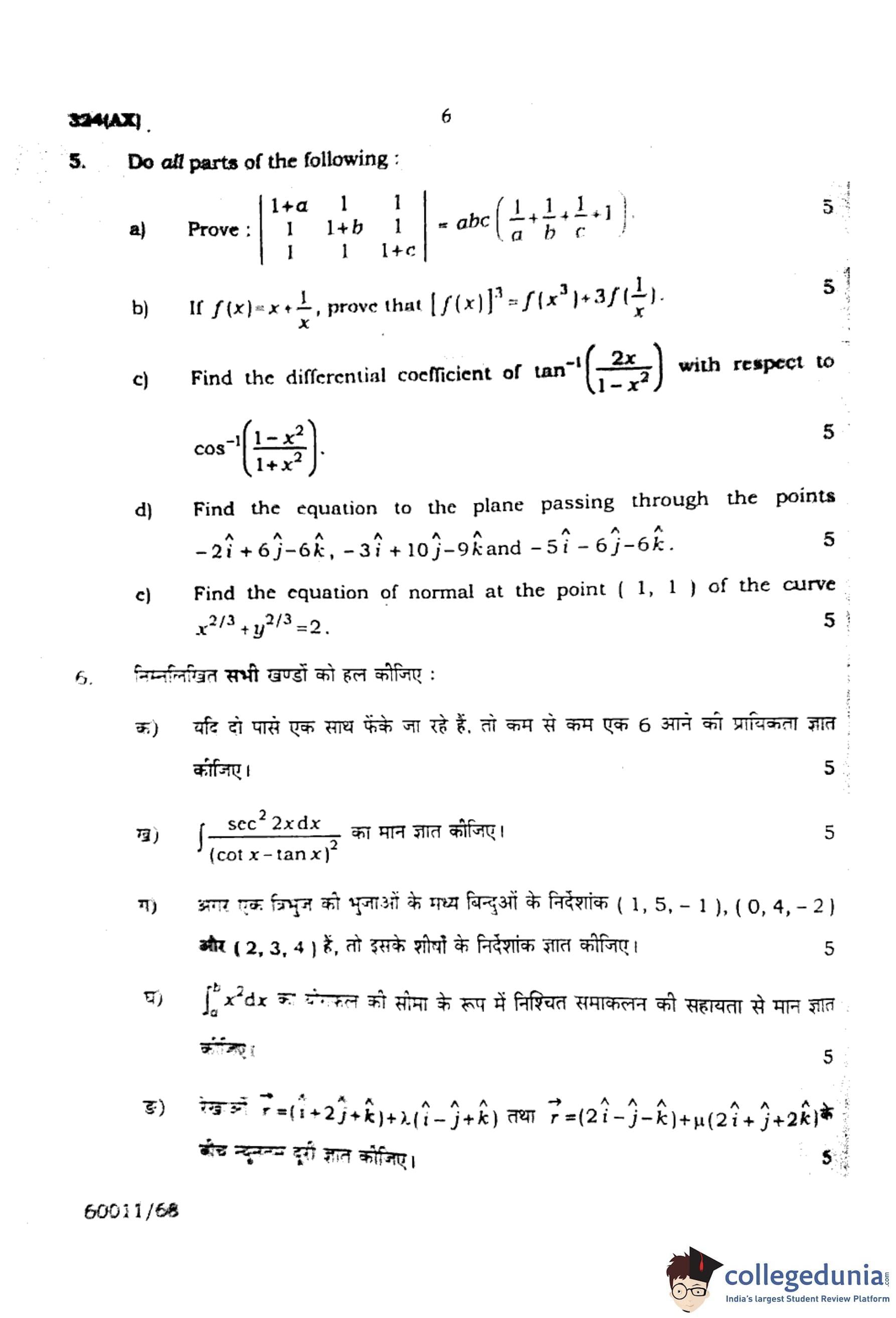
Prove: \[ \left| \begin{matrix} 1+\alpha & 1 & 1
1+\beta & 1 & 1
1 & 1 & 1+\gamma
\end{matrix} \right| = abc \left( \frac{1}{a} + \frac{1}{b} + \frac{1}{c} + 1 \right) \]
If \( f(x) = x + \frac{1}{x} \), prove that \( \left[ f(x) \right]^3 = f(x^3) + 3f\left( \frac{1}{x} \right) \).
Find the differential coefficient of \( \tan^{-1}\left( \frac{2x}{1-x^2} \right) \) \text{with respect to \( x \).
Find the equation of the plane passing through the points \((-2i + 6j - 6k), (-3i + 10j - 9k), (-5i - 6j - 6k)\).
Find the equation of normal at the point \( (1, 1) \) of the curve \( x^{2/3} + y^{2/3} = 2 \).
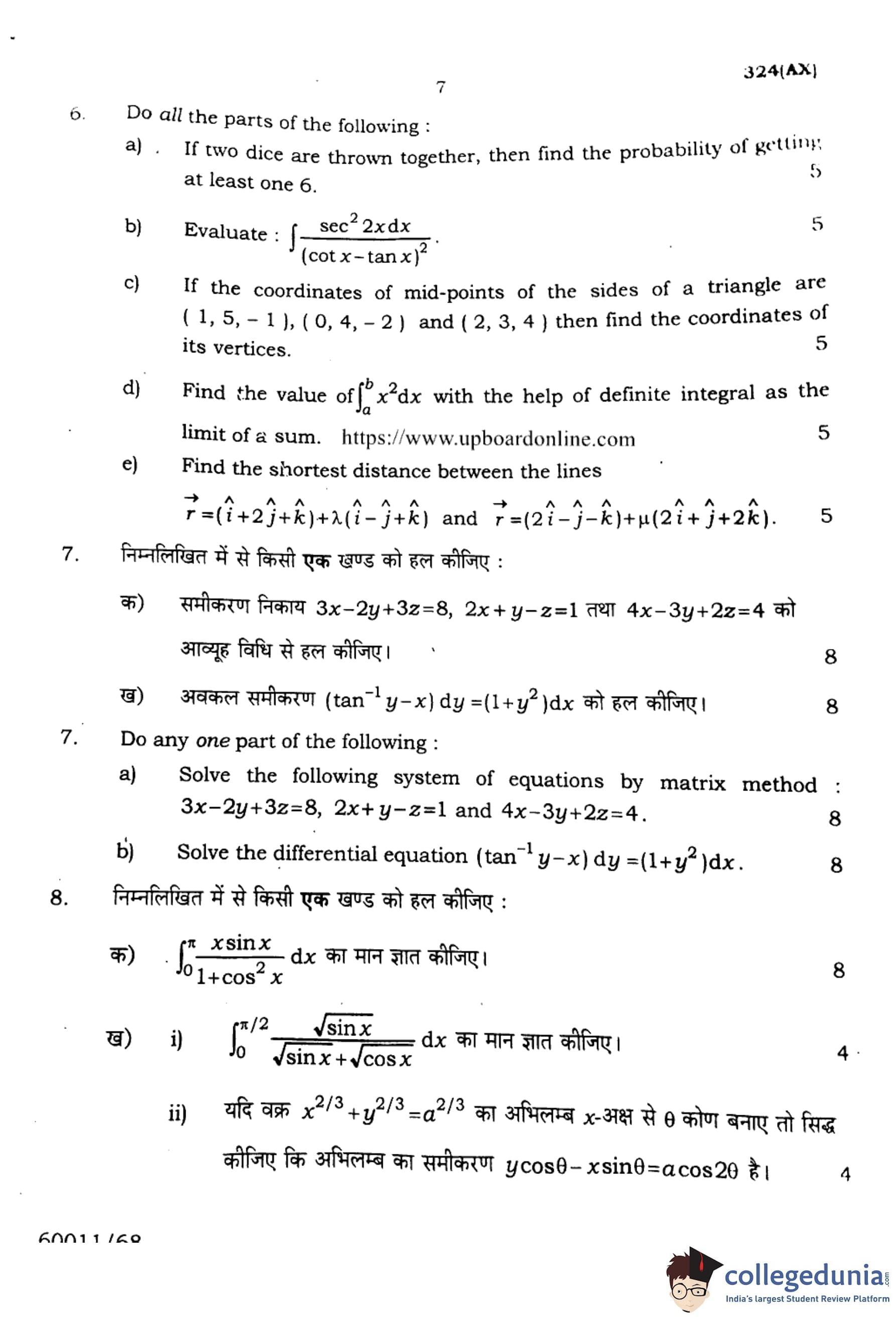
If two dice are thrown together, then find the probability of getting at least one 6.
Evaluate: \[ \int \frac{\sec^2(2x)}{(\cot x - \tan x)^2} \, dx. \]
If the coordinates of mid-points of the sides of a triangle are \( (1, 5, -1), (0, 4, -2) \) and \( (2, 3, 4) \), then find the coordinates of its vertices.
Find the value of \( \int_a^b x^2 \, dx \) with the help of definite integral as the limit of a sum.
Find the shortest distance between the lines \[ \vec{r} = (i + 2j + k) + \lambda(i - j + k) \]
and \[ \vec{r} = (2i - j - k) + \mu(2i + j + 2k) \]
Solve the following system of equations by matrix method: \[ 3x - 2y + 3z = 8, \quad 2x + y - z = 1, \quad 4x - 3y + 2z = 4. \]
Solve the differential equation: \[ \tan^{-1}(y - x) \, dy = (1 + y^2) \, dx. \]
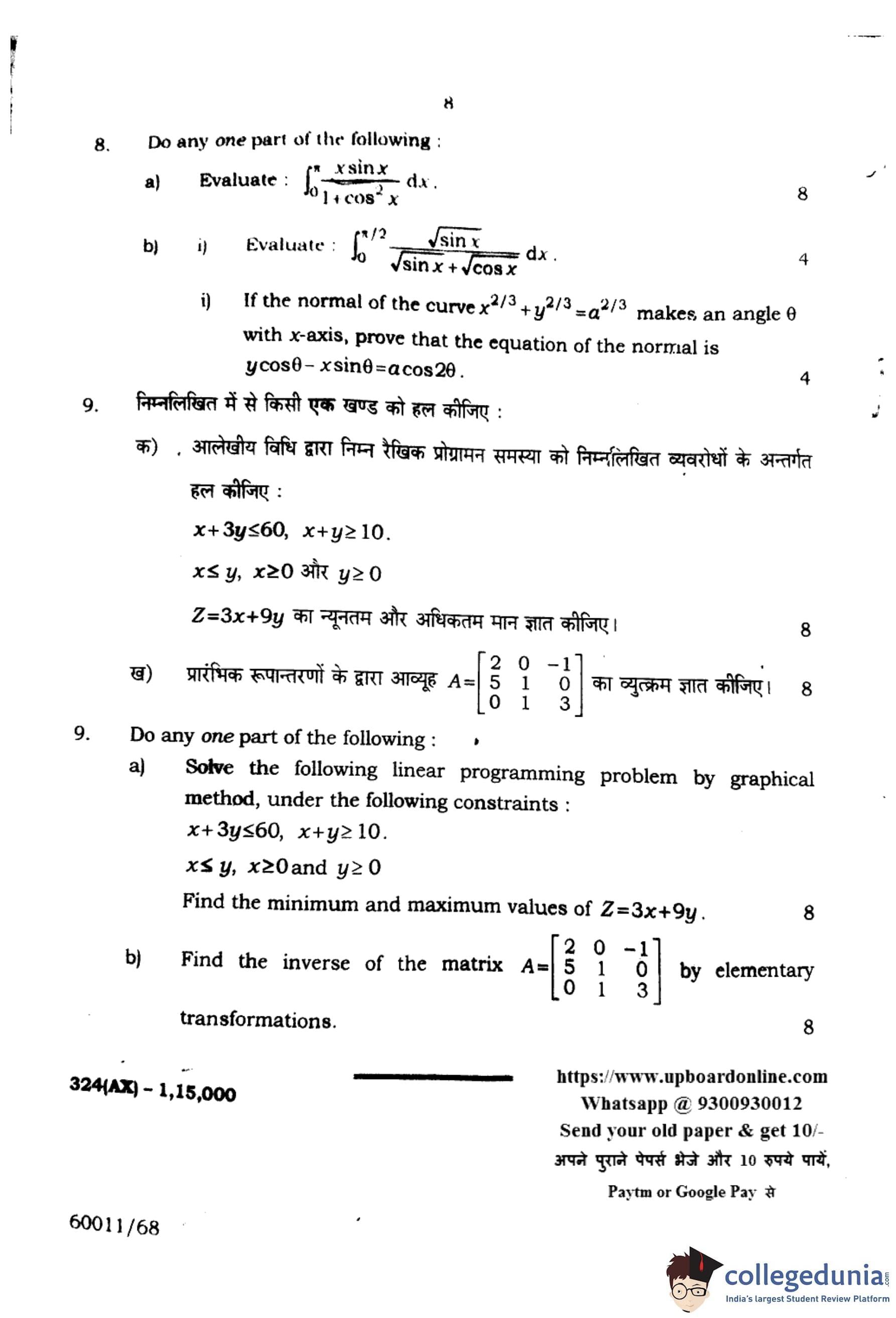
Evaluate: \[ \int_0^\pi \frac{x \sin x}{1 + \cos^2 x} \, dx. \]
Evaluate: \[ \int_0^{\frac{\pi}{2}} \frac{\sqrt{\sin x}}{\sqrt{\sin x + \cos x}} \, dx. \]
If the normal of the curve \[ \frac{x^{2/3}}{a^{2/3}} + \frac{y^{2/3}}{a^{2/3}} = 1 \]
makes an angle \( \theta \) with the x-axis, prove that the equation of the normal is \[ y \cos \theta - x \sin \theta = a \cos 2\theta. \]
Solve the following linear programming problem by the graphical method, under the following constraints: \[ x + 3y \leq 60, \quad x + y \geq 10, \quad x \leq y, \quad x \geq 0, \quad y \geq 0. \]
Find the minimum and maximum values of \[ Z = 3x + 9y. \]
Find the inverse of the matrix \[ A = \begin{pmatrix} 2 & 0 & -1
5 & 1 & 0
0 & 1 & 3 \end{pmatrix} \]
by elementary transformations.

Comments